0x00 前言
0x01 原理 && 应用
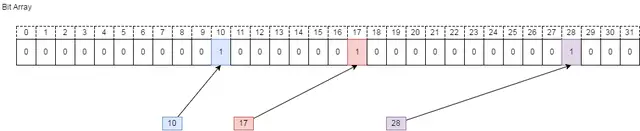
bitmap 比较简单,用一个 bit 来标记某个元素对应的 value,而 Key 即是该元素。由于采用 bit 来存储一个数据,相对节省空间(不考虑稀疏存储的场景下)。假设要对 0-31 内的 3 个元素 (10,17,28) 排序,那么就可以采用 Bitmap 方法(假设这些元素没有重复)。bitmap 算法常用于对大量整形数据做去重和查询
要表示 32 个数,只需要 32 个 bit(4Bytes),首先初始化 4Byte 的空间,将这些空间的所有 bit 位都置为 0

然后,添加 (10,17,28) 到 BitMap 中,需要的操作就是在相应的位置上将 0 置为 1 即可
由于 bitmap 用一个比特位来映射某个元素的状态,此数据结构非常节省存储空间,常用如下:
- 数据去重
- 快速查找,判重
- 排序(将其加入 bitmap 中,然后再遍历获取出来,从而得到排序的结果)
常用实现:golang
以 []uint64 来存储 bit 数据为例,一个 byte 有 64 个二进制位,当然亦可使用 []byte 或其他类型来存储(8 个二进制位)
1、(优先)判断元素在 bit 数组的位置,假设参数为 x
x/64:获取x在 bit 数组中的序号,从0开始x%64:获取x在当前uint64中的位置
// Bitmap represents a scalar-backed bitmap index
type Bitmap []uint64
2、检查 x 是否存在
// Contains checks whether a value is contained in the bitmap or not.
func (dst Bitmap) Contains(x uint32) bool {
blkAt := int(x>> 6)
if size := len(dst); blkAt >= size {
return false
}
bitAt := int(x % 64)
// 将 1 左移 bitAt 位,然后和以前的数据做 & 运算,若该位置的值 >=0,则说明 x 存在,否则则不存在
return (dst[blkAt] & (1 << bitAt)) > 0
}
3、设置 x 到 bit 数组
// Set sets the bit x in the bitmap and grows it if necessary.
func (dst *Bitmap) Set(x uint32) {
blkAt := int(x>> 6)
bitAt := int(x % 64)
if size := len(*dst); blkAt >= size {
dst.grow(blkAt) // 扩容
}
// 将 1 左移 bitAt 位,然后和以前的数据做 | 运算,可将 bitAt 位置的 bit 替换成 1
(*dst)[blkAt] |= (1 << bitAt)
}
4、清理x所在的位置
// Remove removes the bit x from the bitmap, but does not shrink it.
func (dst *Bitmap) Remove(x uint32) {
if blkAt := int(x>> 6); blkAt < len(*dst) {
bitAt := int(x % 64)
// 将 1 左移 bitAt 位,然后对取反,再与当前值做 &,可将 bitAt 位置的 bit 替换成 0
(*dst)[blkAt] &^= (1 << bitAt)
}
}
除了基本操作之外,原项目还提供了 Max 和 Min 方法,本质就是从尾(头)遍历,获取第一个不为 0 的数据
// Min get the smallest value stored in this bitmap, assuming the bitmap is not empty.
func (dst Bitmap) Min() (uint32, bool) {
for blkAt, blk := range dst {
if blk != 0x0 {
return uint32(blkAt<<6 + bits.TrailingZeros64(blk)), true
}
}
return 0, false
}
// Max get the largest value stored in this bitmap, assuming the bitmap is not empty.
func (dst Bitmap) Max() (uint32, bool) {
var blk uint64
for blkAt := len(dst) - 1; blkAt >= 0; blkAt-- {
if blk = dst[blkAt]; blk != 0x0 {
return uint32(blkAt<<6 + (63 - bits.LeadingZeros64(blk))), true
}
}
return 0, false
}
0x02 XDP 中的应用
这里介绍下 bitmap 在字节 EBPF-ACL 项目中的巧妙应用。先介绍下背景,对应与 iptables 的链式规则:
# ipset create black_list hash:net
# ipset add black_list 192.168.3.0/24
# iptables -A INPUT -m set --set black_list src -j DROP #序号 1
# ...... 省略 15 条规则
# iptables -A INPUT -p tcp -m multiport --dports 53,80 -j ACCEPT #序号 16
# ...... 省略 240 条规则
# iptables -A INPUT -p udp --dport 53 -j ACCEPT #序号 256
若匹配 DNS 的请求报文(目的端口 53 的 udp 报文),需要依次遍历所有规则,才能匹配中。其中,ipset/multiport 等 match 项,只能减少规则数量,无法改变 O(N) 的匹配方式
问题就来了,如何设计巧妙的数据结构来解决 iptables 链式匹配的低效问题(在 xdp 程序中)
算法描述
借助于 bitmap 来实现,为了提升匹配效率,将所有的 ACL 规则做预处理,将链式的规则拆分存储。规则匹配时,参考内核的 O(1) 调度算法,在多个匹配的规则中,快速选取高优先级(序号越前优先级越高)的规则
1、规则预处理
按照如下六个维度将 iptables 链式规则拆分,核心思路将规则生成 6 张表 bitmap,其中 key 为关联各个表的属性,value 为 bitmap
- 规则编号:key 为规则编号,value 存储 action 结果
- 源地址:key 为源地址,value bitmap 存储规则编号
- 源端口:key 为端口号
- 目的地址:同上
- 目的端口:同上
- 协议:key 为协议
此外,对于作为 value 的 bitmap,1 表示该规则有该属性,0 表示该规则无该属性
用上面的例子详细说明下:
- 例子中的规则分别编号为:
1(0x1)、16(0x10)、256(0x100),接下来拆分各个规则中的匹配项 - 规则
1只有源地址匹配项,用源地址192.168.3.0/24作为 key,规则编号0x1作为 value,存储到源地址 Map 中 - 规则
16有目的端口、协议包含两个匹配项(协议、目的端口),依次将53、80作为 key,规则编号0x10作为 value,存储到 dport Map 中;将 tcp 协议号6作为 key,规则编号0x10作为 value,存储到 proto Map 中 - 规则
256有目的端口、协议两个匹配项,将目的端口53作为 key,规则编号0x100作为 value,存储到 sport Map 中;将 udp 协议号17作为 key,规则编号0x100作为 value,存储到 proto Map 中 - 依次将规则
1、16、256的规则编号作为 key,动作作为 value,存储到 action Map 中
此外,还需要补充下特殊规则:
- 相同 key 合并:规则编号
16、256均有目的端口为53的匹配项,应该将16、256的规则编号进行按位或操作,然后再存储,即0x10 | 0x100 = 0x110(注意这里是 16 进制) - 通配规则的处理(规则
1):规则1的目的端口、协议均为通配项,应该将规则1的编号按位或追加到现有的匹配项中(下图中下划线的 value 值:0x111、0x11等)。同理,将规则16、256的规则编号按位或追加到现有的源地址匹配项中(下划线的 value 值:0x111、0x110)
按照上面的描述,规则预处理完成,将所有规则的匹配项、动作拆分存储到 6 个 eBPF Map 中,如下图:
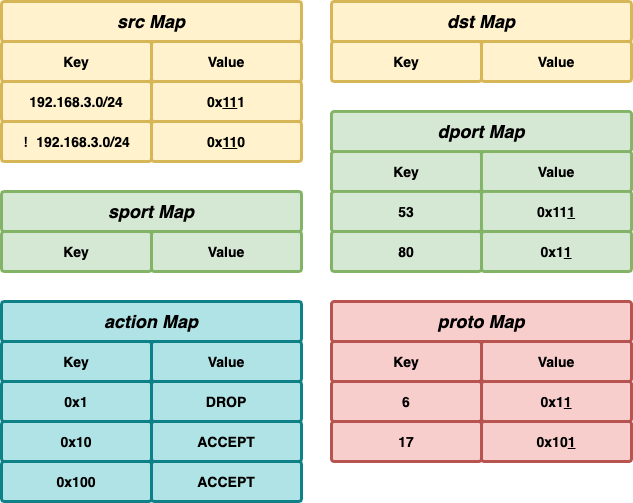
srcMap:
192.168.3.0/24->0x111:CIDR为192.168.3.0/24会命中规则1、16以及256!192.168.3.0/24->0x110:192.168.3.0/24之外的网段会命中规则16、256(这里的实现比较灵活)
dport Map:
53->0x111[0b000100010001]:说明目的端口为53会匹配到规则1、16以及25680->0x11:说明目的端口为80会匹配到规则1、16
2、和iptables规则的兼容性?实际上iptables支持的场景更为复杂,比如若干规则的源、目的IP都包含了CIDR,而且这些CIDR之间存在包含或不包含的关系,如何转换为bitmap存储?(iptables是链式匹配不存在类似转换问题)
# 比如这样的iptables规则
iptables -A INPUT -s 192.168.0.0/16 -p tcp --dport 53 -j ACCEPT #序号1
iptables -A INPUT -s 192.168.00.0/16 -p tcp --dport 80 -j DROP #序号2
iptables -A INPUT -s 172.16.0.0/16 -p tcp --dport 8080 -j DROP #序号3
iptables -A INPUT -s 172.16.1.0/24 -j DROP #序号4
3、链式规则的匹配转换为查表操作,为简化理解,对于一条规则只考虑下面的属性:
- IP 地址:由多条 CIDR 组成的远端地址
- 端口(端口范围):分为源端口 OR 目的端口
- 协议:TCP/UDP/ICMP 等
- 动作:ACCEPT、DROP
- 规则的优先级:priority
- 可能需要一条默认规则(优先级最低)
- 规则的创建时间
匹配规则
报文匹配时,根据五元组(源、目的地址,源、目的端口、协议)依次作为 key,分别查找对应的 eBPF Map,得到 5 个 value。然后将这 5 个 value 进行按位与操作,得到一个 bitmap。这个 bitmap 的每个 bit,就表示了对应的一条规则;被置位为 1 的 bit,表示对应的规则匹配成功,一般有两种情况
- 最终的 bitmap 只有
1位被置位 - 最终的 bitmap 超过
1位被置位,此时需要获取优先级最高的那条(数字最小,即最右边的1)
获取到优先级最高的bitmap的唯一位,再用此值去查询action对应的eBPF Map,获取最终的ACTION结果,一次查询完成
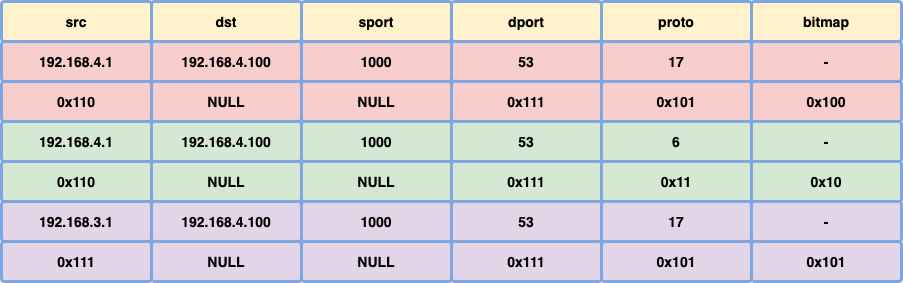
根据上图举例说明,同时验证下是否与 iptables 的规则匹配结果一致。假设有报文(192.168.4.1:10000 -> 192.168.4.100:53 udp)的五元组作为 key,查找 eBPF Map 后,得到的 value 分别为:
src_value = 0x110dst_value = NULLsport_value = NULLdport_value = 0x111proto_value = 0x101
将非 NULL 的 value 进行按位与操作(0x110 & 0x111 & 0x101),得到 bitmap = 0x100。由于 bitmap 只有一位被置位 1(只有一条规则匹配成功,即规则 256),利用该 bitmap 作为 key,查找 action Map,得到 value 为 ACCEPT;同样,报文(192.168.4.1:1000 -> 192.168.4.100:53 tcp)的五元组作为 key,查找 eBPF Map 后,最终匹配到规则 16
第二种情况,当报文(192.168.3.1:1000 -> 192.168.4.100:53 udp)的五元组作为 key,计算结果为 0x101(多个 bit 被置位),由于 bitmap 有两位被置位(规则 1、256),按规则应该取优先级最高的规则编号作为 key,查找 action Map。在原文实现借鉴了内核 O(1) 调度算法的思想,使用指令 bitmap &= -bitmap 即可取到优先级最高(最低有效位)的 bit(如 0x101 &= -(0x101) 最终等于 0x1),最后使用 0x1 作为 key,查找 action Map,得到 value 为 DROP
0x03 代码实现
上面算法的描述过于抽象,实现中还需要考虑如下细节:
- 对CIDR规则的处理,单条规则的CIDR数组是否存在冲突?整体规则条目中CIDR是否存在冲突?
- 对端口范围的处理、未设置端口范围按照全端口匹配
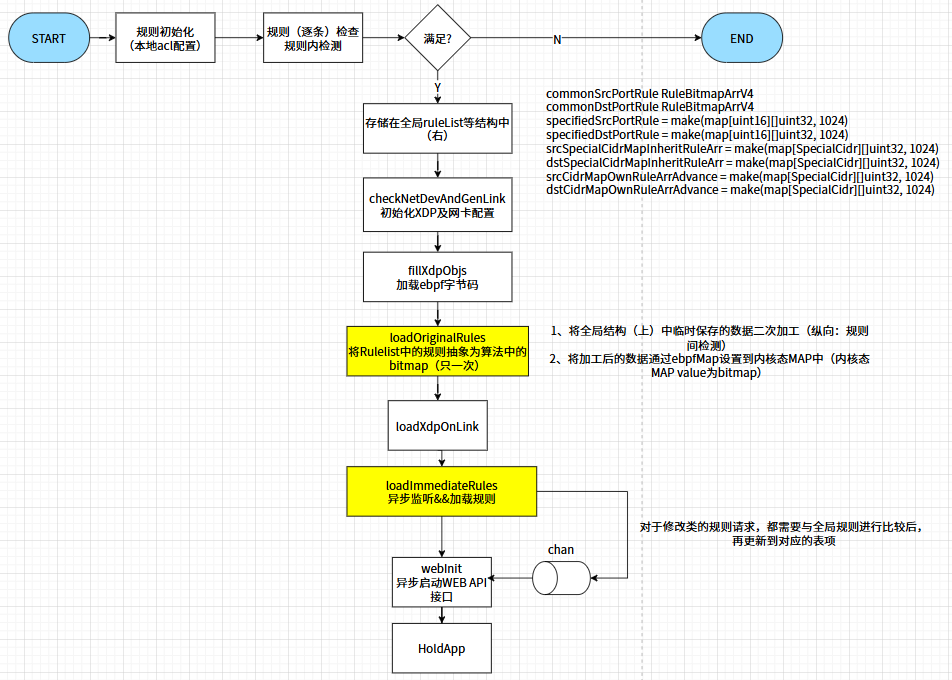
本小节以项目xdp_acl进行简单说明,项目的整体运行流程如下:
0x04 内核态实现
数据结构
ebpf maps,包含src_v4、sport_v4、dst_v4、dport_v4、proto_v4和rule_action_v4,特点是内核态只读,用户态读写
以src_v4为例,注意其类型为BPF_MAP_TYPE_LPM_TRIE,比较适合CIDR匹配这种场景
#define BITMAP_ARRAY_SIZE 160
__u64 bitmap[BITMAP_ARRAY_SIZE];
struct bpf_map_def SEC("maps") src_v4 = {
.type = BPF_MAP_TYPE_LPM_TRIE,
.key_size = sizeof(struct lpm_key_ipv4), // 8 byte: mask len; 8 byte: host byte oreder
.value_size = sizeof(bitmap),
.max_entries = IP_MAX_ENTRIES_V4,
.map_flags = BPF_F_NO_PREALLOC,
};

又如sport_v4存储端口匹配规则的内核态map,注意这里需要存储0-65535每个端口对应的bitmap,即key为端口号,value为bitmap结构
// 支持的最多端口个数 1~65535; 65536 == 2^16
#define PORT_MAX_ENTRIES_V4 65536
struct bpf_map_def SEC("maps") sport_v4 = {
.type = BPF_MAP_TYPE_HASH,
.key_size = sizeof(__u16), // 2 byte; net byte oreder
.value_size = sizeof(bitmap),
.max_entries = PORT_MAX_ENTRIES_V4,
};
匹配规则实现
匹配规则实现get_hit_rules_optimize

static __always_inline void get_hit_rules_optimize(__u64 *rule_array[], __u32 *rule_array_len_ptr, __u64 *rule_array_index_ptr, __u64 *hit_rules_ptr)
{
if (5 == *rule_array_len_ptr)
{
// 五个规则的第0号位置进行& 与运算,因为优先级0号位置最高,从左向右依次降低
//rule_array[0] 规则1
//rule_array[1] 规则2
//rule_array[2] 规则3
//rule_array[3] 规则4
//rule_array[4] 规则5
//rule_array_index_ptr 遍历后会加1,这里会重复8次,外层重复20次,那就对上了
*hit_rules_ptr = (rule_array[0][*rule_array_index_ptr]) & (rule_array[1][*rule_array_index_ptr]) & (rule_array[2][*rule_array_index_ptr]) & (rule_array[3][*rule_array_index_ptr]) & (rule_array[4][*rule_array_index_ptr]);
if (*hit_rules_ptr > 0)
{
return;
}
// 省略8次重复的逻辑
}
return;
}
0x05 用户态实现
规则==> bpf Map的转换
1、对端口范围规则的处理,需要处理如下case
- 未设置端口匹配的规则(全端口匹配),需要转换为
0-65535,即每个端口key对应的value bitmap中,这条规则(priority)都需要被置位 - 设置指定端口的规则
genPortConstraintsRuleArrAndLoadIntoMap方法用于在第一次运行时,初始化配置文件中的端口规则,数据源来自全局配置规则列表ruleList,把ruleList中所有规则的端口规则,按规则处理完成之后,通过bpfMapForPort写入到内核态的map中
// specifiedPortRule:key 端口号,value:priority 序号数组
// 参数specifiedPortRule 是全局变量 specifiedDstPortRule = make(map[uint16][]uint32, 1024) 的引用
// 参数 commonPortRulePtr 是全局变量 commonSrcPortRule RuleBitmapArrV4 的 引用
func genPortConstraintsRuleArrAndLoadIntoMap(originalRulesWgPtr *sync.WaitGroup,
bpfMapForPort *ebpf.Map, //映射到内核态map
commonPortRulePtr *RuleBitmapArrV4,
specifiedPortRule map[uint16][]uint32,
name string) {
b := time.Now()
var portSli []uint16
// 读取本地的rules规则
for ruleInx := 0; ruleInx < len(ruleList); ruleInx++ {
if onlyContainICMP(ruleList[ruleInx].Protos) {
//icmp无端口
continue
} else {
if name == MAP_TYPE_PORT_SRC {
portSli = ruleList[ruleInx].PortSrcArr
} else {
portSli = ruleList[ruleInx].PortDstArr
}
}
// 没有设置端口,那就是全端口匹配
fmt.Println("len(portSli)", len(portSli), portSli)
if len(portSli) == 0 {
// 设置bitmap
//commonPortRulePtr:暂存全端口的bitmap的置位情况
setBitmapBit(commonPortRulePtr, ruleList[ruleInx].Priority /*priority即iptables的序号*/)
} else {
// 设置了端口
for portInx := 0; portInx < len(portSli); portInx++ {
// specifiedPortRule是一个map
// 这里先聚合,然后遍历完所有的端口规则后,再设置bitmap
specifiedPortRule[portSli[portInx] /*端口的值*/] = append(specifiedPortRule[portSli[portInx]], ruleList[ruleInx].Priority)
}
}
// portArr = nil
//GC
portSli = portSli[:0]
}
/*
经过初始化后,两类规则:
- 全端口(未设置端口的)规则:保存在commonPortRulePtr bitmap中
- 端口规则:specifiedPortRule 保存指定所有端口的规则,value为 序号的数组
*/
// 下发配置
var portMapKey uint16
var portMapValue RuleBitmapArrV4
// 遍历1-65535
for port := PORT_MIN; port <= PORT_MAX; port++ {
portMapKey = htons(uint16(port))
if specifiedPortRuleArr, ok := specifiedPortRule[uint16(port)]; !ok {
// 未设置基于端口的规则(那就是全端口命中了)
if err := bpfMapForPort.Put(portMapKey, commonPortRulePtr /*注意,这个数据结构只有一份*/); err != nil {
zlog.Error(err.Error(), "; bpfMapForPort Put error")
}
} else {
// 设置了指定端口的规则
// commonPortRulePtr是端口的bitmap
// 注意:这里是深拷贝,portMapValue获取的是commonPortRulePtr的独立副本
portMapValue = *commonPortRulePtr
// specifiedPortRuleArr[ruleInx] 就是 .Priority的数组
for ruleInx := 0; ruleInx < len(specifiedPortRuleArr); ruleInx++ {
// 在原有的全端口bitmap规则基础上,加入指定端口的priority到bitmap中,这样完成之后再整体放入内核的map
setBitmapBit(&portMapValue, specifiedPortRuleArr[ruleInx])
}
//写入到内核的map中去
if err := bpfMapForPort.Put(portMapKey, &portMapValue); err != nil {
zlog.Error(err.Error(), "; bpfMapForPort Put error")
}
}
}
//...
}
2、对源/目的IP(CIDR规则)规则的处理,同端口处理一样,把ruleList中所有规则的CIDR规则,按规则处理完成之后,通过bpfMapForIP写入到内核态的map中。不过这里需要注意的是,由于CIDR之间可能会存在子集包含与包含关系,所以要边处理边检查CIDR集合关系。比如192.168.1.0/24对应规则priority为100,而192.168.1.0/25(子集)对应priority为100,那么最终specialCidrMapRuleArr中192.168.1.0/25对应的priority数组至少应该是[100,200]
// specialCidr: key 为cidr结构体,value为priority 数组
func genIpConstraintsRuleArrAndLoadIntoMap(originalRulesWgPtr *sync.WaitGroup, bpfMapForIP *ebpf.Map, specialCidrMapRuleArr map[SpecialCidr][]uint32, name string) {
/*
{
"specialCidr struct": [4, 5, 6],
"specialCidr struct": [4, 5, 6, 7, 8]
}
*/
b := time.Now()
var addrArr []Addr
var addr Addr
var aSpecialCidr, bSpecialCidr SpecialCidr
var ruleArr, newCidrRuleNoArr []uint32
var compareRet CIDR_COMPARE_RET
for ruleInx := 0; ruleInx < len(ruleList); ruleInx++ {
if MAP_TYPE_IP_SRC == name {
addrArr = ruleList[ruleInx].AddrSrcArr
} else {
addrArr = ruleList[ruleInx].AddrDstArr
}
for _, addr = range addrArr {
aSpecialCidr = addr.CidrSpecial
newCidrRuleNoArr = []uint32{ruleList[ruleInx].Priority}
for bSpecialCidr, ruleArr = range specialCidrMapRuleArr {
compareRet = compareCIDR(&aSpecialCidr, &bSpecialCidr)
if CIDR_EQUAL == compareRet || CIDR_CONTAIN == compareRet {
// 新项 cidr 与 遍历项 cidr 相同 || 新项 cidr 比 遍历项 cidr 大
specialCidrMapRuleArr[bSpecialCidr] = append(ruleArr, ruleList[ruleInx].Priority)
} else if CIDR_INCLUDED == compareRet {
// 新项 cidr 比 遍历项 cidr 小
newCidrRuleNoArr = append(newCidrRuleNoArr, ruleArr...)
removeDupRuleNo(&newCidrRuleNoArr)
}
// CIDR_NO_CROSS: 新项 cidr 与 遍历项 cidr 无交叉; 啥也不做
}
if _, ok := specialCidrMapRuleArr[aSpecialCidr]; !ok {
specialCidrMapRuleArr[aSpecialCidr] = newCidrRuleNoArr
}
ruleArr = ruleArr[:0]
newCidrRuleNoArr = newCidrRuleNoArr[:0]
}
addrArr = addrArr[:0]
}
for specialCidr, rulesNoArr := range specialCidrMapRuleArr {
keyNew := getLpmKey(&specialCidr)
var value RuleBitmapArrV4
for i := 0; i < len(rulesNoArr); i++ {
setBitmapBit(&value, rulesNoArr[i])
}
if err := bpfMapForIP.Put(keyNew, &value); err != nil {
zlog.Error(err.Error(), "; bpfMapForIP Put error")
}
}
//...
}
热更新(CRUD)实现
xdp_acl支持异步方式修改规则,以新增规则为例:
0x0 一些细节
type SpecialCidr struct {
First [4]byte
Last [4]byte
MaskBits [4]byte
MaskSize uint32
}
SpecialCidr结构体用于表示CIDR网络地址范围,包含网络的起始地址、结束地址、掩码位和掩码长度。 rules_about.go:52-57
SpecialCidr字段意义
First [4]byte: 网络地址的起始IP地址(4字节IPv4格式)
Last [4]byte: 网络地址的结束IP地址(广播地址)
MaskBits [4]byte: 子网掩码的字节表示
MaskSize uint32: 掩码长度(如/24中的24)
func (a *SpecialCidr) contains(b *SpecialCidr) bool {
if a.First[0] != (a.MaskBits[0]&b.First[0]) || a.First[0] != (a.MaskBits[0]&b.Last[0]) {
return false
}
if a.First[1] != (a.MaskBits[1]&b.First[1]) || a.First[1] != (a.MaskBits[1]&b.Last[1]) {
return false
}
if a.First[2] != (a.MaskBits[2]&b.First[2]) || a.First[2] != (a.MaskBits[2]&b.Last[2]) {
return false
}
if a.First[3] != (a.MaskBits[3]&b.First[3]) || a.First[3] != (a.MaskBits[3]&b.Last[3]) {
return false
}
return true
}
SpecialCidr.contains实现注释
contains方法用于判断当前CIDR是否包含另一个CIDR网络段。 helpers.go:57-75
实现逻辑:
逐字节检查包含关系:对IPv4地址的4个字节分别进行检查
掩码运算验证:使用a.MaskBits[i] & b.First[i]和a.MaskBits[i] & b.Last[i]来验证目标CIDR的起始和结束地址是否都在当前CIDR的网络范围内
完全包含条件:只有当目标CIDR的起始地址和结束地址经过当前CIDR的掩码运算后,都等于当前CIDR的起始地址时,才认为是包含关系
该方法在CIDR比较功能中被调用,用于检测网络地址段之间的包含、相等或无交集关系。 helpers.go:77-89