0x00 前言
时间轮是用来解决海量百万级定时器(或延时)任务的最佳方案,linux 的内核定时器就是采用该数据结构实现。本文介绍 go-zero 框架中时间轮的实现及使用场景。
应用场景
- 自动删除缓存中过期的 Key:缓存中设置了 TTL 的 kv,通过把该 key 对应的 TTL 以及回调方法注册到 timewheel,到期直接删除
- 延时任务,将任务注册到 timewheel,过期自动触发执行
- 在 TcpServer 中,用来管理海量 Tcp 连接的超时定时器,如 zinx 的定时器 实现
0x01 时间轮基础
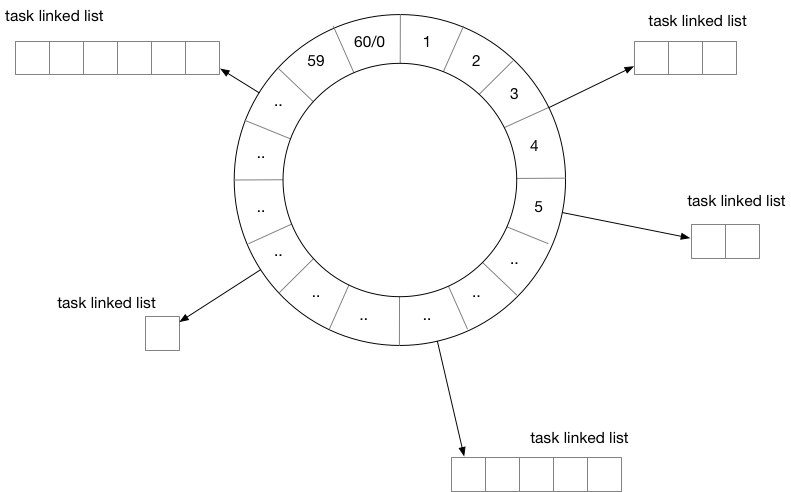
简单时间轮
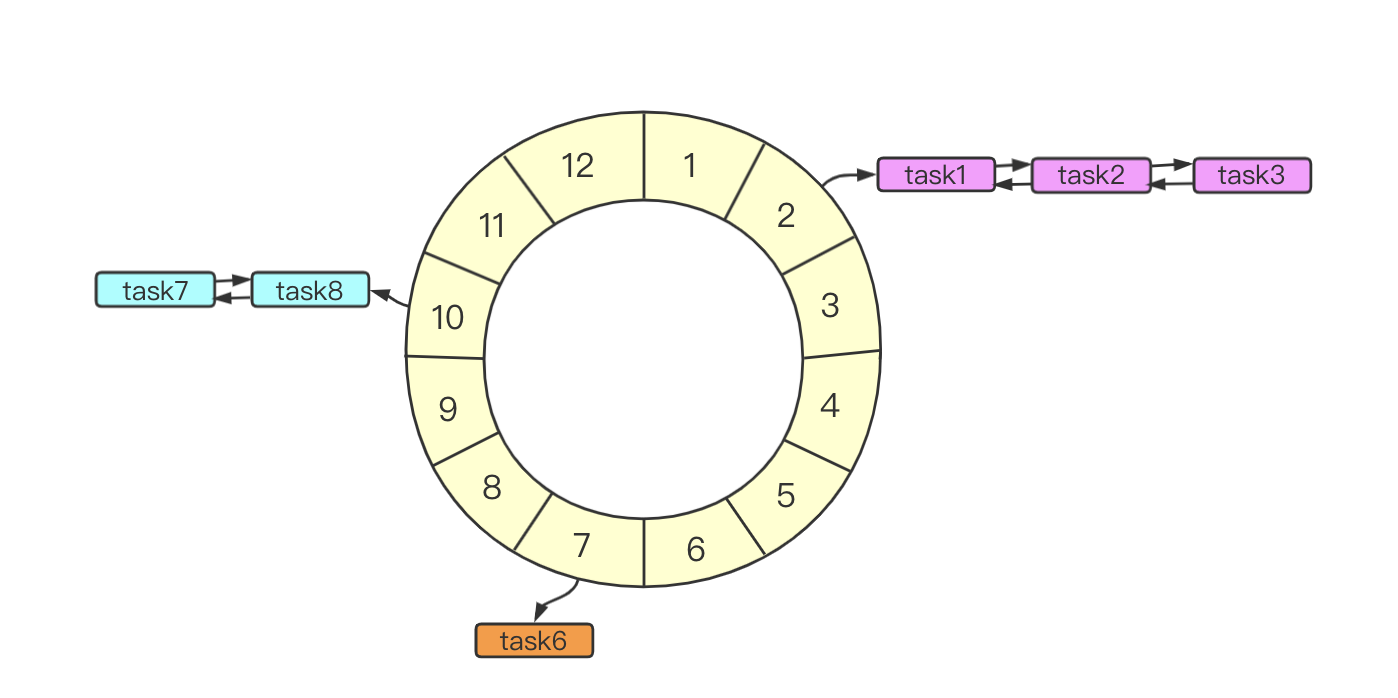
如上图,一个普通的时间轮,类似于时钟表盘,指针(pointer)每隔一段时间前进一格(interval,tick 一次),一圈代表一个周期(circle),定时任务以链表(双向)方式置放在表盘的刻度处,当指针前进到当前位置时,遍历任务链表,执行相应的任务。
从开发角度而言,实现一个时间轮:
- 时间轮是一个由固定长度
length的数组(本例子中就是[1,12])构造而成的环形队列 - 时间轮的长度决定了延时任务的刻度,假设上面的刻度为
1s(即时间轮1s前进一格),那么该时间轮只能表达延时任务在1s至12s内的任务;时间轮的长度也即时间轮的周期(12s) - 注册任务按照 当前刻度 + 延时时长 % 时间轮周期 计算得出,假设当前指针在
5s的位置,此时添加一个延时周期为5s的任务,那么该任务需要注册到刻度为10s的格子对应的任务链表中 - 数组中的每个元素都指向一个双向链表,用于存储对应的延时任务
- 时间轮的插入复杂度是
O(1),删除指定节点的复杂度是O(n),因为需要遍历双向链表以查找到要删除的节点 - 当时间轮指针转动到对应的单元格时,顺序执行双向链表中存储的任务
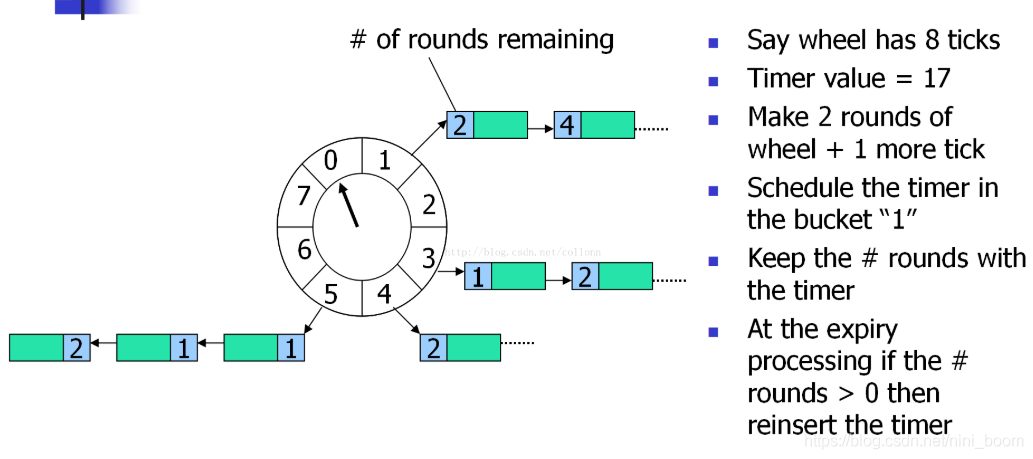
基础时间轮的缺点是无法注册延时超过时间轮周期的任务,如何解决呢?
解决方法 1:加 circle 计数器
此方法相当于给双向链表中存储的任务加多一个 “圈数” 的维度,如某任务需要 30s 后执行,当前指针刻度在 1s,那么该任务的圈数就是 2,放在第 6 格中,即时间轮转 2 圈加 6 个格子后,触发此任务;
注意,此策略中,时间轮指针每前进一格,需要把此格对应的任务链表中,所有的任务的 circle 计数器都减 1,如果 circle==0,那么说明,任务时间已到期,执行该任务
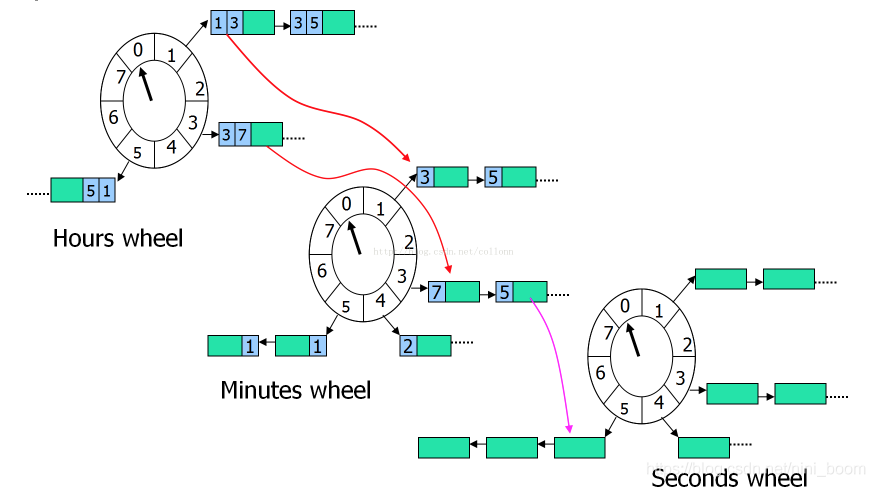
解决方法 2:层级时间轮
这是一种典型的 “空间换时间” 的思路,按照时间轮周期的倍数进行合理分层,有两个优点:
- 避免任务堆积在某个 slot 上
- 支持任意长时间的延时任务注册
0x02 go-zero 的时间轮
时间轮的实现大同小异,这里选取 go-zero 的实现做简单分析。先抽象中时间轮的核心数据结构及方法:
type TimingWheel struct {
//...
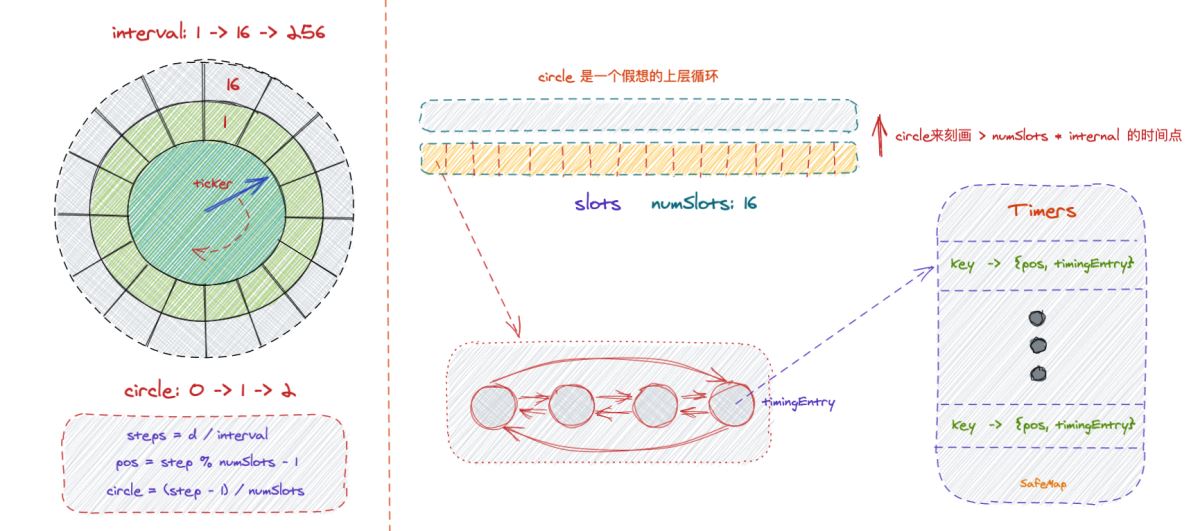
interval time.Duration // 时间轮 ticker 时间
slots []*list.List // 模拟时间轮环形结构,加任务存储
timers *SafeMap // 用于存储
tickedPos int // 记录当前指针所在的位置
numSlots int // 时间轮的槽位数量
//...
}
时间轮
1、ticker
用于时间轮的转动,同时更新 tw.tickedPos 的值
func (tw *TimingWheel) onTick() {
tw.tickedPos = (tw.tickedPos + 1) % tw.numSlots
l := tw.slots[tw.tickedPos]
tw.scanAndRunTasks(l)
}
2、getPositionAndCircle
用于根据传入参数 d time.Duration,计算出,这个 d 对应的任务该放在时间轮的哪个 slot 里面,即 pos 值;同时,假设 d 已经超过一个时间轮的范围了,计算其对应的转动圈数 circle 值
func (tw *TimingWheel) getPositionAndCircle(d time.Duration) (pos, circle int) {
steps := int(d / tw.interval)
pos = (tw.tickedPos + steps) % tw.numSlots
circle = (steps - 1) / tw.numSlots
return
}
3、timers:Map 的作用
timers 主要用于保存任务(key 为标识)及其在时间轮中的 slot 的 pos 位置,方便查找的时候快速定位
func (tw *TimingWheel) setTimerPosition(pos int, task *timingEntry) {
if val, ok := tw.timers.Get(task.key); ok {
timer := val.(*positionEntry)
timer.item = task
timer.pos = pos
} else {
// 保存位置 pos 和任务
tw.timers.Set(task.key, &positionEntry{
pos: pos,
item: task,
})
}
}
任务结构
type timingEntry struct {
baseEntry
value interface{}
circle int // 记住这个字段:用以解决分层的问题
diff int
removed bool
}
这里需要着重理解下timingEntry.diff字段的意义(见下文分析)
0x03 代码分析(1)
本小节分析下 timingwheel 的实现。
结构体
时间轮的 定义 如下,不难看出,TimingWheel 中的 channel 把时间轮的添加 / 删除操作做成异步的,避免加锁带来的复杂度:
// A TimingWheel is a timing wheel object to schedule tasks.
type TimingWheel struct {
interval time.Duration // 单个时间格时间间隔
ticker timex.Ticker // 定时器,做时间推动,以 interval 为单位推进
slots []*list.List // 时间轮
timers *SafeMap // 存储 task{key, value} 的 map [执行 execute 所需要的参数]
tickedPos int // at previous virtual circle
numSlots int // 初始化 slots num
execute Execute // 执行函数
setChannel chan timingEntry
moveChannel chan baseEntry
removeChannel chan interface{}
drainChannel chan func(key, value interface{})
stopChannel chan lang.PlaceholderType
}
初始化时间轮
// 真正做初始化
func newTimingWheelWithClock(interval time.Duration, numSlots int, execute Execute, ticker timex.Ticker) (
*TimingWheel, error) {
//...
// 初始化 slots 中用来存储任务的所有 slots
tw.initSlots()
// start ticker
go tw.run()
return tw, nil
}
异步开启的 run 方法,本质上是一个基于 for...select 模式的 scheduler:
func (tw *TimingWheel) run() {
for {
select {
// 定时器 ticker ,时间推动
case <-tw.ticker.Chan():
tw.onTick()
// 异步处理增加任务
case task := <-tw.setChannel:
tw.setTask(&task)
// 异步处理删除任务
case key := <-tw.removeChannel:
tw.removeTask(key)
// 异步处理任务更新操作
case task := <-tw.moveChannel:
tw.moveTask(task)
case fn := <-tw.drainChannel:
tw.drainAll(fn)
case <-tw.stopChannel:
tw.ticker.Stop()
return
}
}
}
时间轮转动 onTick 及扫描任务链表
每隔ticker时间,定时移动时间轮的指针,先保存当前指针的位置,然后从slot中拿出对应的list.List,传参list到scanAndRunTask方法中执行,如下:
func (tw *TimingWheel) onTick() {
tw.tickedPos = (tw.tickedPos + 1) % tw.numSlots
//获取时间轮(槽)对应的任务链表
l := tw.slots[tw.tickedPos]
//扫描当前的任务链表
tw.scanAndRunTasks(l)
}
scanAndRunTask方法的步骤如下:
- 遍历整个list,先清理掉被删掉任务(
task.removed被置位),再将循环圈数circle不为0的任务的圈数减去1,因为时间流转了刚好1个周期 - 剩下的是
circle为0的有效任务,考虑到有更新操作,若为更新操作(task.diff被置位),则将当前任务删除后,根据任务更新的触发时间task.diff重新注册到时间轮中 - 经由前两步过滤,剩下的任务就是scan要执行的任务,把待执行的任务加入到执行待执行队列
tasks中,通过tw.runTasks(tasks)方法并发执行(扫描完list之后并发执行。注意:会控制并发数)
func (tw *TimingWheel) scanAndRunTasks(l *list.List) {
var tasks []timingTask
for e := l.Front(); e != nil; {
task := e.Value.(*timingEntry)
if task.removed {
// 被标记为删除,在scanAndRunTasks中进行清理
next := e.Next()
l.Remove(e)
e = next
continue
} else if task.circle > 0 {
task.circle--
e = e.Next()
continue
} else if task.diff > 0 {
next := e.Next()
l.Remove(e)
// (tw.tickedPos+task.diff)%tw.numSlots
// cannot be the same value of tw.tickedPos
pos := (tw.tickedPos + task.diff) % tw.numSlots
tw.slots[pos].PushBack(task)
tw.setTimerPosition(pos, task)
task.diff = 0
e = next
continue
}
// task.circle==0
// && task.diff == 0 :说明定时器已经到达触发时间
tasks = append(tasks, timingTask{
key: task.key,
value: task.value,
})
next := e.Next()
l.Remove(e)
tw.timers.Del(task.key)
e = next
}
//一轮扫描完之后,并发执行tasks
tw.runTasks(tasks)
}
0x04 代码分析(2):任务操作
任务的添加和删除是必须要实现的,更新可以通过先删除再添加的方式实现。不过go-zero的任务更新实现有些许不一样,此外,在 go-zero 中,任务更新的场景,比如基于 TTL 的缓存的设置 逻辑,一旦有 key 被设置就刷新 TTL
MoveTimer:任务更新
MoveTimer 这个方法主要用于动态更新时间轮已存在的 key 及其过期时间,对应的处理方法是 moveTask;
// MoveTimer moves the task with the given key to the given delay.
func (tw *TimingWheel) MoveTimer(key interface{}, delay time.Duration) error {
if delay <= 0 || key == nil {
return ErrArgument
}
select {
//异步处理
case tw.moveChannel <- baseEntry{
delay: delay,
key: key,
}:
return nil
case <-tw.stopChannel:
return ErrClosed
}
}
更新任务:moveTask
moveTask方法是更新timeWheel中已存在的任务的延迟时间。有两种调用场景:
- 添加任务时,如果任务已经存在,那么只需更新方法(在
setTask中判断如果有这个key就调用moveTask) - 通过更新的API接口更新
func (tw *TimingWheel) moveTask(task baseEntry) {
// timers: 通过任务的 key 获取 pos 位置及 task
val, ok := tw.timers.Get(task.key)
if !ok {
return
}
timer := val.(*positionEntry)
// {delay < interval} => 延迟时间比一个时间格间隔还小,没有更小的刻度,说明任务应该立即执行
// 可能是task设置的延迟时间太小了,那就直接执行
if task.delay < tw.interval {
threading.GoSafe(func() {
tw.execute(timer.item.key, timer.item.value)
})
return
}
// 如果 > interval,则通过 延迟时间 delay 计算其出时间轮中的 new pos, circle
// 需要重新设置触发时间,即根据新的延迟时间计算出新的定位和circle
pos, circle := tw.getPositionAndCircle(task.delay)
//根据pos和circle还有旧数据,修改task的信息,做一些标记,在扫描到这个task的时候再真正修改和重新定位
//新/旧任务的pos不一样,需要移动,但是由于并发问题,不会在这里移动
if pos >= timer.pos {
timer.item.circle = circle
// 记录前后的移动 offset,为了后面过程重新入队(先提前计算好位置)
timer.item.diff = pos - timer.pos //diff的值分两种情况,diff为0,说明不需要移动;非0才需要移动
} else if circle > 0 {
//说明pos(旧) < timer.pos(新)且剩余圈数大于0,即任务触发的时间提前了,但是不会在这一圈触发,需要计算一下diff偏移量和走多少圈
// 先把该任务转移到下一层(即circle减一),将 circle 转换为 diff 的一部分
circle--
//更新circle
timer.item.circle = circle
// 因为是一个数组,要加上 numSlots [也就是相当于要走到下一层]
timer.item.diff = tw.numSlots + pos - timer.pos //注意这里
} else {
// 如果 offset 提前了,此时 task 也还在第一层
// 标记删除老的 task,并重新入队,等待被执行
//pos(旧) < timer.pos(新),且circle==0,说明是在本链表中执行任务,这里删除旧的添加新的(其实是一样)
timer.item.removed = true //标记当前节点待删除
newItem := &timingEntry{
baseEntry: task,
value: timer.item.value,
}
//重新加到任务链表的尾部
tw.slots[pos].PushBack(newItem)
tw.setTimerPosition(pos, newItem)
}
}
关于moveTask的这部分实现,有个问题是为何不在这里直接就移动节点呢?个人观点是基于效率的考虑,注意到moveTask方法本质上还是对任务节点的操作,并且任务节点是散落在各个slot的任务链表中的。如果在moveTask中去移动,需要遍历找到相应的slot节点,然后遍历链表,找到对应的节点进行操作(因为需要找到该节点对应于链表中的后节点),因此,这里的逻辑仅仅是设置标志(如item.diff),对节点的处理放在扫描任务链表的方法scanAndRunTasks中实现。
从另一个角度看,MoveTask的实现中,着重突出了延迟操作,即只在扫描链表的时候才处理更新/删除节点等操作,其好处是如果某些任务key频繁改动,无需频繁进行重新定位操作(在时间轮中重新定位),而重新定位操作需要保证并发安全,引入了复杂度
if pos >= timer.pos {
timer.item.circle = circle
// 记录前后的移动 offset,为了后面过程重新入队(先提前计算好位置)
timer.item.diff = pos - timer.pos //diff的值分两种情况,diff为0,说明不需要移动;非0才需要移动
} else if circle > 0 {
//说明pos(旧) < timer.pos(新)且剩余圈数大于0,即任务触发的时间提前了,但是不会在这一圈触发,需要计算一下diff偏移量和走多少圈
// 先把该任务转移到下一层(即circle减一),将 circle 转换为 diff 的一部分
circle--
//更新circle
timer.item.circle = circle
// 因为是一个数组,要加上 numSlots [也就是相当于要走到下一层]
timer.item.diff = tw.numSlots + pos - timer.pos //注意这里
}
增加任务setTask
任务是通过异步方式增加到时间轮的,主要逻辑如下代码所示:
- 从
timers即map中查询此任务是否已经存在,若存在,则调用moveTask更新任务(主要是执行触发时间) - 若任务不存在,会通过
getPositionAndCircle方法计算出任务在时间轮中相对于当前的ticked的定位pos,以及要转的圈数circle,将任务放在时间轮槽对应的任务链表队列上,并且维护timers的map索引,方便查询任务定位
func (tw *TimingWheel) setTask(task *timingEntry) {
if task.delay < tw.interval {
task.delay = tw.interval
}
if val, ok := tw.timers.Get(task.key); ok {
entry := val.(*positionEntry)
entry.item.value = task.value
tw.moveTask(task.baseEntry)
} else {
pos, circle := tw.getPositionAndCircle(task.delay)
task.circle = circle
tw.slots[pos].PushBack(task) //向时间轮的list插入任务,注意使用尾插法
tw.setTimerPosition(pos, task) //更新timers map
}
}
删除任务removeTask
删除任务是通过索引找到这个task,然后把task标记为删除,即置位timer.item.removed,然后再每一轮扫描到list的scanAndRunTask方法中再做清理,即直接跳过该任务:
func (tw *TimingWheel) removeTask(key interface{}) {
val, ok := tw.timers.Get(key)
if !ok {
return
}
timer := val.(*positionEntry)
timer.item.removed = true
tw.timers.Del(key)
}
0x05 一些细节问题
1、ticker丢失
注意到核心scheduler的各个case,在另外一个版本的实现如下:
func (tw *TimeWheel) start() {
for {
select {
case <-tw.ticker.C:
tw.tickHandler()
case task := <-tw.addTaskChannel:
tw.addTask(&task)
case key := <-tw.removeTaskChannel:
tw.removeTask(key)
case <-tw.stopChannel:
tw.ticker.Stop()
return
}
}
}
func (tw *TimeWheel) tickHandler() {
l := tw.slots[tw.currentPos]
tw.scanAndRunTask(l)
if tw.currentPos == tw.slotNum-1 {
tw.currentPos = 0
} else {
tw.currentPos++
}
}
假设tickHandler的执行耗时超过了一个tw.ticker.C周期,那么就会导致时间轮精度不准,这里如何优化的思路是,借助一个tickQueue chan time.Time,将<-tw.ticker.C的结果进行存储,当tickQueue满时抛出异常,说明当前时间轮的任务执行有问题(延迟任务),优化代码如下:
//增加一个异步的ticker缓冲器
func (tw *TimeWheel) tickGenerator() {
if tw.tickQueue == nil {
return
}
for {
select {
case <-tw.ticker.C:
select {
case tw.tickQueue <- time.Now():
default:
panic("raise long time blocking")
}
}
}
}
func (tw *TimeWheel) start() {
for {
select {
case <-tw.tickQueue: //替换为从缓冲器触发
tw.tickHandler()
case task := <-tw.addTaskChannel:
tw.addTask(&task)
case key := <-tw.removeTaskChannel:
tw.removeTask(key)
case <-tw.stopChannel:
tw.ticker.Stop()
return
}
}
}
2、时间轮本身的任务执行应该是异步的(回调任务的执行不应该堵塞),可以考虑将回调任务使用协程池的方式进行调度,或者结合一些异步队列中间件,将到期的任务进行异步化处理
3、思考这个问题:时间轮(内存)的任务如何持久化呢?比如重启之后,时间轮的任务会丢失,如何才能恢复到重启前的状态?
0x06 总结
本文分析了一款典型的简单时间轮的实现,通过给任务节点添加 circle 字段来解决一维时间轮无法扩展时间的问题,从而突破长时间的限制。可以借鉴的地方有如下:
- 任务的删除、更新操作,都仅仅通过标记的方式延迟进行,避免并发的加锁问题,仅在方法
scanAndRunTasks中实现 - 外部操作接口,如任务的增删改,也是通过异步的方式实现
- 在时间轮的scheduler核心方法
TimingWheel.run中,要注意每个case条件下的逻辑运行时间,如果运行时间过长会导致其他的case条件不能及时得到运行